
Blues University is an ongoing series of articles geared towards beginner- and intermediate-level developers who are looking to expand their knowledge of embedded development and the IoT.
Embedded systems discreetly supply the computing power for many electronic devices, performing specific functions in appliances, phones, cars, and countless gadgets. Embedded systems are purpose-built for these tasks, so they lack the broad functionalities of traditional computers.
Every time you make a call, microwave a meal, or even apply the brakes in your car, an embedded system is at work. And because we rely on them so much, it's paramount that they operate smoothly and reliably.
A key factor in embedded systems' performance, reliability, and efficiency is the choice of coding language. And for professionals in this subfield, C remains a popular option (though C++ is becoming more popular!).
It's important to remember that programming languages are just tools: A hammer might be perfect for a nail, but it's not the best choice for a screw. Similarly, while languages like Python or JavaScript excel at web development or data science, they may not be suited to the stringent demands of many embedded systems. These languages often require more resources and run on top of layers that abstract hardware details, potentially compromising speed and precision. In contrast, C has direct access to hardware, making it much more efficient.
This article will take a dive into using C for embedded development. You'll gain practical insights into creating and debugging programs using this ubiquitous and time-tested language.
Why Is C the Most Popular Embedded Language?
To understand the dominance of C in embedded development, let's look back to its inception.
C emerged in the early 1970s as a more efficient and portable alternative to Fortran, the era's primary language for performing scientific and numerical computations. At a time when computing resources were scarce and expensive, C quickly became popular due to its adaptability in resource-constrained environments. Because this adaptability is a function of a design philosophy that prizes efficiency and portability, C is ideal for devices with limited memory and computational power.
Much of C's power lies in its close-to-the-metal interaction with underlying hardware. By allowing you to manipulate pointers, memory addresses, and hardware registers directly, C enables precision that few languages can match. This low-level access is essential in embedded systems, where understanding and controlling the minute details of hardware can make the difference between a flawlessly working device and one that doesn't work at all.
C is also tailored for performance. It's compact, so it doesn't have the overhead of many modern high-level languages. This feature is especially crucial in real-time systems, where delays or inefficiencies can have serious consequences. An embedded system must be able to react to changes or inputs instantaneously. C's performance-oriented design ensures that embedded systems can meet the rigorous demands of real-time operations.
Understanding C: Syntax and Basic Constructs
C is not only powerful, it's also elegant in its simplicity. By mastering a few foundational constructs, you can unlock a wealth of possibilities in embedded development. Let's explore these basic constructs.
Basic Syntax of C
A programming language's syntax is the set of rules dictating the structure of the language's programs. Let's take a look at C's syntax.
Variables and Data Types
C has a set of fundamental data types to store integers, floating-point numbers, characters, and others. Here's a brief look:
int age = 25; // Integer type
float weight = 68.5; // Floating-point type
char initial = 'A'; // Character typeOperators
Operators allow you to perform various operations on variables and values. For example:
int sum = age + 5; // Addition
int product = age * 2; // MultiplicationBasic I/O operations
The standard C library provides functions to perform input and output operations
through the standard I/O library, stdio.h. Consider the code below:
#include <stdio.h> // Include the standard I/O library
int main() {
printf("Enter your age: "); // Output
scanf("%d", &age); // Input
printf("You are %d years old.", age); // Output with variable
return 0;
}As this example demonstrates...
- The
scanffunction is for input, letting you accept user input from the console to store in variables. In the example above,scanf("%d", &age);expects an integer input from the user. The&beforeageis the address-of operator, which providesscanfwith the memory location of theagevariable. This way, the user-entered value is stored in theagevariable. - The
printffunction is for output. It takes as its argument a format string, which can contain placeholders for variables. In the example above, the screen would display the text,"Enter your age:".
Control Structures
Control structures determine how statements are executed in sequence. By enabling complex logic and behaviors, control structures let you take different paths based on conditions or repeat certain blocks of code as needed. Let's explore these constructs in detail.
Loops
C offers several loops for repetitive tasks. Loops enable the execution of a statement or a block of statements multiple times based on a specified condition. Both of these loops repeat the print statement five times.
for(int i = 0; i < 5; i++) { // For loop
printf("%d\n", i);
}
int count = 0;
while(count < 5) { // While loop
printf("%d\n", count);
count++;
}Conditional Statements and Decision-Making
These structures allow for different sequences of execution based on whether
certain conditions hold true. Conditional statements enable programs to make
decisions and branch accordingly.
if (age > 18) { // If statement
printf("You're an adult.");
} else if (age == 18) { // Else if statement
printf("Welcome to adulthood.");
} else { // Else statement
printf("You're not an adult yet.");
}Functions and Modular Programming
Modular programming lets you break down an expansive program into smaller, more manageable modules or functions. They make it easier to organize, debug, and reuse your code.
Creating User-Defined Functions
Functions are blocks of code that encapsulate a specific task or operation. When you create a function, you're essentially defining a new set of instructions your program can execute whenever required.
// A simple function to add two numbers
int add(int a, int b) {
return a + b;
}
int main() {
int result = add(5, 3);
printf("The sum is: %d", result);
return 0;
}Scope
Variables in C have a scope that defines their visibility. Local variables (within functions) have local scope, while variables outside all functions have a global scope.
int globalVar = 10; // This is a global variable
int someFunction() {
int localVar = 5; // This is a local variable
// localVar can be used only within this function.
}What You Need to Know for Basic IoT Applications
The Internet of Things (IoT) is vast and ever-expanding. From smart thermostats in homes to connected cars on the roads, IoT applications are becoming ubiquitous. However, despite the diverse array of applications, many IoT systems share a common set of features, with core libraries, protocols, and hardware interactions that are useful across numerous IoT scenarios.
Hardware Interactions
The distinguishing feature of IoT applications is the way they interact directly with the physical world. C has the low-level access required to drive these real-world actions.
Reading Sensors
You can use C to read data from sensors, like temperature, humidity, or light levels. With direct memory access and hardware registers, C can fetch data in real time. For example, by using analog-to-digital converter (ADC) peripherals, a program written in C could read and process analog sensor values:
int sensor_value = ADC_Read(CHANNEL); // Example function to read from a specific ADC channelDriving Actuators
Whether switching on lights or controlling motors, actuators bring IoT to life. C code interacts with general-purpose input/output (GPIO) pins and can use protocols like inter-integrated circuit (I2C) and serial peripheral interface (SPI), so it's ideally suited for applications involving actuators.
GPIO_SetPin(HIGH, PIN_NUMBER); // Example function to set a GPIO pin highCommunicating with Other Devices
IoT is all about connectivity. C can be used to implement communication protocols like universal asynchronous receiver/transmitter (UART), SPI, and I2C, enabling devices to talk to each other or to a central server:
UART_Send(data); // Example function to send data over UARTAdvanced C Structure
As you dive into embedded development in C, you'll quickly find that the basics only scratch the surface. The depth and versatility of C mean there's always more to explore. As you advance, there are several concepts that can elevate your embedded development skills and expand the range of projects you can tackle.
Key Components
C's rich collection of data structures and types is one of the main reasons it's so popular in embedded systems. Here are some components you'll grow to appreciate as you work on embedded systems in C:
Strings: In C, strings are essentially arrays of characters terminated by a null character ('\0'). It's important to understand strings and manipulate them efficiently, especially when parsing data or communicating with other systems.
char greeting[] = "Hello, world!"; // Define a string
char name[20]; // Declare a character array to store a name
// Copy the greeting to the name array
strcpy(name, greeting);
// Print the concatenated string
printf("Combined string: %s\n", name);
// Calculate the length of the string
int length = strlen(name);
printf("Length of the string: %d\n", length);In the above code, you define a string greeting and a character array name. You
use the strcpy function to copy the contents of the greeting string into the
name array, creating a concatenated string. Then, you calculate the string
length using the strlen function, which counts the number of characters in the
string.
These basic string operations help you efficiently manipulate, parse, and communicate data in embedded systems.
Arrays: Arrays allow you to store multiple items of the same type together. In embedded systems, this capability is especially useful when dealing with data series, like sensor readings over time.
int sensorReadings[3];
// Populate the array with sample sensor data
sensorReadings[0] = 23;
sensorReadings[1] = 18;
sensorReadings[2] = 30;
// Calculate the average sensor reading
int sum = 0;
for (int i = 0; i < 3; i++) {
sum += sensorReadings[i];
}
float average = (float)sum / 3;
printf("Average Reading: %.2f\n", average);In this code, you declare an array sensorReadings to store multiple sensor
readings. You then populate the array with sample sensor data.
To calculate the average sensor reading, iterate through the array, sum up the readings, and divide the sum by the number of readings.
Linked lists: Unlike arrays, linked lists are dynamic and can grow or shrink as needed. They're particularly useful in scenarios where the amount of data is unpredictable and efficient memory usage is a priority. Here's how you create a linked list in C:
#include <stdio.h>
#include <stdlib.h>
// Define a structure for a linked list node
struct Node {
int data;
struct Node* next;
};
int main() {
// Create a linked list with three nodes
struct Node* head = NULL;
struct Node* second = NULL;
struct Node* third = NULL;
head = (struct Node*)malloc(sizeof(struct Node));
second = (struct Node*)malloc(sizeof(struct Node));
third = (struct Node*)malloc(sizeof(struct Node));
head->data = 1; // Assign data to the first node
head->next = second; // Link the first node to the second node
second->data = 2;
second->next = third;
third->data = 3;
third->next = NULL;
// Traversing the linked list and printing data
struct Node* current = head;
while (current != NULL) {
printf("%d -> ", current->data);
current = current->next;
}
printf("NULL\n");
return 0;
}In this code, you define a structure for a linked list node, which contains data and a pointer to the next node. Then, you create a linked list with three nodes, link them together, and traverse through the linked list, printing the data.
Advanced Memory Management
IoT devices often come with memory constraints. Embedded systems don't have the luxury of vast RAM or expansive storage like general-purpose computers, so efficient memory management is essential. For optimal performance and resource usage in C, you must conduct advanced memory management — that means paying attention to the following:
Dynamic memory allocation: It's crucial to allocate and free up memory during runtime. If dynamically allocated memory is not freed after use, it may lead to a memory leak, consuming all the available memory and leading to slowdowns or system failures.
#include <stdio.h>
#include <stdlib.h>
int main() {
int *dynamicArray;
// Dynamically allocate an array of integers with space for 5 elements
dynamicArray = (int *)malloc(5 * sizeof(int));
if (dynamicArray == NULL) {
printf("Memory allocation failed. Program exiting.\n");
return 1;
}
// Initialize the array
for (int i = 0; i < 5; i++) {
dynamicArray[i] = i * 10;
}
// Use the dynamically allocated array
for (int i = 0; i < 5; i++) {
printf("Element %d: %d\n", i, dynamicArray[i]);
}
// Free the dynamically allocated memory to prevent memory leaks
free(dynamicArray);
return 0; // Exit the program successfully
}In the above code, you allocate memory dynamically for an integer array of 5
elements using malloc — a function that allocates a specified amount of memory
in the heap and returns a pointer to the first byte of the allocated memory.
After using the dynamically allocated memory, it's vital to free it by using
free to prevent memory leaks. Memory leaks can lead to resource exhaustion and
program instability, which can wreak havoc in resource-constrained environments
like IoT devices.
Stack vs. Heap: Stack is best suited for short-lived variables, typically local to a function, where memory allocation and de-allocation patterns are well-defined and sequential. Use Heap for data that requires a dynamic or longer lifespan beyond a single function call, where the size or lifetime might not be known at compile time.
With this knowledge, you can create applications that are memory-efficient and responsive, even in the most resource-constrained environments. We'll look more deeply into these topics in the "Memory Optimization" section later.
Hardware Knowledge
Embedded development may seem daunting, especially if you think it requires a deep understanding of electronics. Don't worry, though: While advanced electrical engineering knowledge may be helpful, it's not a prerequisite! A basic understanding of how microcontrollers work, the principles of digital I/O, and general interfacing methods are all you need to get started. As you progress, you'll pick up more hardware knowledge.
Contrasting Approaches: Differences Between C and Arduino
As an embedded developer, you may have already come across the Arduino platform. While coding for Arduino and coding in C have some similarities, understanding their differences will help you decide which one meets your project requirements.
Be sure to visit other Blues University articles on Arduino programming.
Language Differences
At first glance, Arduino code looks very much like C or C++. This is unsurprising: Arduino uses a subset of C/C++ tailored to make embedded programming accessible for beginners. However, there are some differences.
- Arduino comes with a unique set of functions, like
digitalWrite()andanalogRead(), which aren't available in standard C. - Instead of the traditional
main()function in C, Arduino sketches havesetup()andloop()functions.setup()runs once whileloop()keeps running indefinitely, providing a clear structure for initialization and repetitive tasks.
The following code turns an LED (connected to digital pin 13) on and off with a
1-second delay in the loop, showing the repetitive nature of the loop()
function:
void setup() {
// This function runs once at the beginning
pinMode(13, OUTPUT); // Set digital pin 13 as an output
}
void loop() {
// This function runs repeatedly in a loop
digitalWrite(13, HIGH); // Turn on the built-in LED
delay(1000); // Pause for 1 second (1000 milliseconds)
digitalWrite(13, LOW); // Turn off the LED
delay(1000); // Pause for 1 second (1000 milliseconds)
}Platform Variations
Arduino's big selling point is its abstraction layer, which hides much of the complexity of setting up and communicating with the hardware:
-
Abstraction layer: When using the Arduino IDE and libraries, you don't have to dive into the hardware specifics. For instance, toggling a pin is as simple as
digitalWrite(pinNumber, HIGH). In contrast, pure C might require you to manipulate specific hardware registers to achieve the same result. -
Ease of use: Arduino platforms come with built-in bootloaders, which makes uploading code straightforward. Direct programming in C might require additional tools and steps, such as using a programmer or understanding the chip's memory layout.
Performance and Flexibility
Arduino's simplicity is perfect for beginners and building many straightforward applications. However, there are times when its abstraction becomes a limitation:
-
Performance: Since Arduino provides a higher-level interface, there's often overhead, which may impact performance. Direct C programming, with its closer hardware access, can be optimized for speed, making it more suitable for real-time or performance-critical applications.
-
Flexibility: With C, you have the power to control every aspect of the hardware, tailor memory management, and use specific microcontroller features that may not be exposed or easily accessible in the Arduino environment.
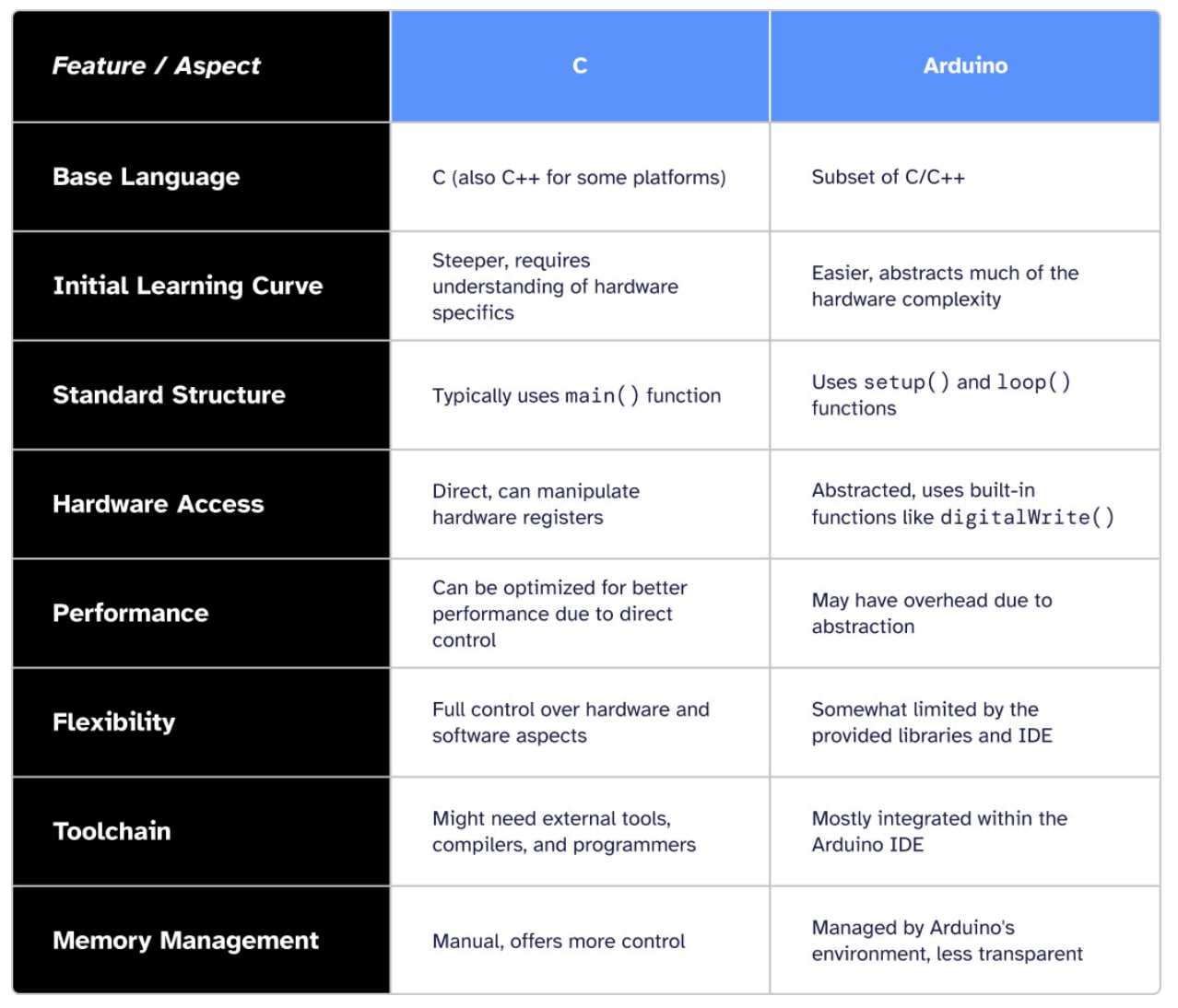
C vs Arduino
The chart below compares the key features of Arduino and C.
When to Use C over Arduino
Arduino is an excellent choice for beginners (and even many more advanced applications). However, as you progress and encounter scenarios demanding higher performance, more flexibility, or specific hardware features, C becomes more appealing.
Here are some scenarios where C may be a better choice than Arduino:
-
When you need portability: Say you're designing a product that starts on one microcontroller but may eventually need to transition to another due to supply chain issues or for improved hardware capabilities. With C, you can shift your code across diverse microcontrollers and platforms with minimal effort. Relying solely on Arduino means remaining tied to its ecosystem, which is often limiting.
-
When incorporating external libraries is crucial: For example, assume you're working on a project that requires a niche communication protocol or proprietary algorithm library that's not available in the Arduino framework. C lets you integrate any external library, ensuring your project doesn't hit unexpected roadblocks.
-
When optimal resource use is paramount: If you're developing a device meant to run on a minuscule power source or with extremely limited memory, every byte and milliampere counts. In cases like these, where the slightest overhead from Arduino's abstraction could affect performance, C's granular resource management is indispensable.
-
When aiming for industry standards: If you're gearing up to transition from hobbyist projects and prototypes to commercial-grade embedded products, you should know that the industry standard in the professional embedded arena is C.
Arduino's ecosystem is fantastic for rapid prototyping and learning — but when your demands are more exacting, C can be a more powerful option!
Tips and Tricks in C for Embedded Development
The confined environment of embedded development poses challenges that simply don't arise in conventional software development. Here are some strategies to help you keep your applications running smoothly.
Memory Optimization
Memory is often scarce in embedded systems, and efficiently managing it is paramount. In an embedded context, unpredictability is your enemy. Dynamic memory allocation, while flexible, introduces unpredictability due to the potential for memory fragmentation and allocation failures.
Whenever feasible, lean towards static memory allocation. Doing so reduces the risk of memory leaks and offers a more deterministic memory footprint, making your system more predictable.
Consider the following example:
#include <stdio.h>
#include <stdlib.h>
int main() {
// Allocate memory for an integer
int *value = (int *)malloc(sizeof(int));
if (value == NULL) {
printf("Memory allocation failed.\n");
return 1;
}
// Now, we need to free the allocated memory to prevent a memory leak
free(value);
value = NULL; // Always set the pointer to NULL after freeing the memory
// Now the memory is de-allocated and can be safely reused
return 0;
}In the above code, you allocate memory dynamically using malloc to store an
integer. To prevent a memory leak, remember to free this memory using free when
you're done with it. It's also a good practice to set the pointer to NULL
after freeing the memory to avoid any accidental use of the de-allocated memory.
Debugging Techniques
Mastering debugging techniques can distinguish between a smooth operating system and endless hours of troubleshooting. In embedded systems, it's common to use serial communication for debugging. The Universal Asynchronous Receiver-Transmitter (UART) is a widely available interface for serial communication.
Read more about Understanding Sensor Interfaces - UART, I2C, SPI and CAN.
Here's a simple example of how to use serial logs for debugging:
#include <stdio.h>
int main() {
// Initialize serial communication, assuming a function like "initUART()" is available
initUART();
// Simulate an error condition
int sensorValue = 200; // This value should be in a valid range
// Check if the sensor value is within an expected range
if (sensorValue < 0 || sensorValue > 100) {
// Log an error message to the serial port
printf("Error: Sensor value out of range - %d\n", sensorValue);
}
// Continue with the program...
return 0;
}In this example, you first initialize the UART for serial communication. Note
that you need to have a real implementation of initUART(). Then, you simulate
an error condition where a sensor value falls out of the expected range. When
this error condition is detected, you log an error message using printf, which
sends the message to the serial port.
Safe Code Practices in Embedded Development
The constrained environment and real-time demands of embedded systems can increase the impact of errors, so it's essential to write safe and maintainable code. Here are some best practices to ensure your embedded C code is robust:
Limit the use of global variables: Global variables, accessible from any part of the code, can introduce unpredictability, especially in multithreaded environments where multiple threads can modify them simultaneously. When global variables are essential, ensure you access them atomically or use mutual exclusion (mutex) mechanisms to protect against concurrent access. This keeps the system's state coherent and predictable.
#include <stdio.h>
// Define a global variable
int globalCounter = 0;
void incrementGlobalCounter() {
// Simulate a function that increments the global variable
globalCounter++;
}
int main() {
// Initialize the global variable
globalCounter = 10;
// Perform some operations
incrementGlobalCounter();
// Access the global variable
printf("Global Counter: %d\n", globalCounter);
return 0;
}In this example, you have a global variable, globalCounter, accessible from
both the incrementGlobalCounter and main functions. This variable can
introduce unpredictability when multiple parts of the code access and modify it
simultaneously!
To ensure predictability, it's a best practice to limit its use and, when
necessary, access it atomically or use mutual exclusion (mutex) mechanisms to
protect against concurrent access. For instance, you can introduce a mutex using
the pthread library to protect the global variable globalCounter from
concurrent access.
#include <stdio.h>
#include <pthread.h> // Include the pthread library for mutex
int globalCounter = 0;
// Define a mutex
pthread_mutex_t globalCounterMutex;
void incrementGlobalCounter() {
// Lock the mutex before modifying the global variable
pthread_mutex_lock(&globalCounterMutex);
globalCounter++;
// Unlock the mutex after the modification
pthread_mutex_unlock(&globalCounterMutex);
}
int main() {
globalCounter = 10;
// Initialize the mutex
pthread_mutex_init(&globalCounterMutex, NULL);
// Perform some operations
incrementGlobalCounter();
// Access the global variable
printf("Global Counter: %d\n", globalCounter);
// Destroy the mutex
pthread_mutex_destroy(&globalCounterMutex);
return 0;
}Before modifying the global variable, you lock the mutex using
pthread_mutex_lock, and after the modification, you unlock it with
pthread_mutex_unlock. This ensures that only one thread can modify the global
variable at a time, maintaining consistency and coherence in a multithreaded
environment.
Pointer precautions: Incorrect pointer usage is a primary source of
notorious bugs. Always initialize your pointers before use. Exercise caution
when performing pointer arithmetic, and consistently check for NULL before
dereferencing. These practices can drastically reduce segmentation faults and
memory corruption issues.
#include <stdio.h>
int main() {
int data = 42;
int *dataPtr = NULL; // Initialize the pointer to NULL
// Check for NULL before dereferencing
if (dataPtr != NULL) {
// Perform some operations with the pointer
dataPtr = &data; // Assign the address of 'data' to the pointer
// Use pointer arithmetic with caution
int result = *dataPtr + 10;
printf("Result: %d\n", result);
} else {
printf("Pointer is NULL, cannot dereference.\n");
}
return 0;
}In this example, you initialize the pointer dataPtr to NULL. Before
dereferencing the pointer or performing any operations with it, you check if the
pointer is NULL. Additionally, you take caution when performing pointer
arithmetic by first assigning the address of the data variable to the pointer
and then dereferencing it.
Use the const and static keywords: Accidentally modifying data or exposing
internal variables can lead to unforeseen behaviors. Whenever possible, render
data and variables immutable by marking them as const. Using this keyword
protects your data against unintentional modifications. Meanwhile, the static
keyword limits the scope of a variable to its defining source file, preventing
external access.
#include <stdio.h>
// Define a constant variable
const int maxAttempts = 3;
// Declare a static variable
static int accessCount = 0;
// Function that uses the static variable
void recordAccess() {
accessCount++;
}
int main() {
// Attempt to modify the constant (will result in a compiler error)
// maxAttempts = 5;
// Access the constant
printf("Maximum Attempts: %d\n", maxAttempts);
// Use the static variable
recordAccess();
printf("Access Count: %d\n", accessCount);
return 0;
}Here, you use the const and static keywords to define a constant variable
maxAttempts, which can't be modified once initialized. Then, you declare a
static variable accessCount, which is limited to the scope of its defining
source file and can't be accessed externally.
Error handling: Ignoring or improperly handling errors can cascade into larger system malfunctions. Always check the return values from functions! If something seems amiss, take decisive actions, be it retrying, logging an error, or safely restarting a module.
Bounds checking: Overflowing buffers or arrays can corrupt memory and
introduce unpredictable behaviors. Vigilantly ensure that array indices or
buffer sizes are within bounds. Functions like strncpy over strcpy or
snprintf over sprintf can help prevent overflows.
#include <stdio.h>
#include <string.h>
int main() {
// Define an array with a specific size
char buffer[10];
// Attempt to copy a longer string (potential buffer overflow)
// strcpy(buffer, "This is a longer string than the buffer size allows.");
// Use strncpy for bounds checking
strncpy(buffer, "SafeCopy", sizeof(buffer));
// Print the content of the buffer
printf("Buffer: %s\n", buffer);
return 0;
}In this code, you use the strncpy function instead of strcpy to copy the
string into buffer, which has a specific size. This method ensures that the
operation doesn't exceed the bounds of the buffer.
Avoid recursive functions: Embedded systems, especially those with tight memory constraints, can quickly run out of stack space with recursive functions. Favor iterative solutions over recursive ones. While recursion might sometimes offer elegant solutions, in constrained systems, the associated risks often outweigh the benefits.
Concurrency in Embedded Development
While concurrency is powerful, it introduces complexities, especially in embedded systems. With multiple threads or tasks executing in parallel or with asynchronous interrupt-driven code, managing shared resources and ensuring data integrity become paramount. Here's how you can gracefully handle concurrency in embedded C development:
Critical sections: These are the parts of the code where global variables, hardware peripherals, and other shared resources are accessed. If you don't oversee these critical sections appropriately, race conditions can arise. If you're working in a multithreaded environment, you should protect these sections using mutexes. In cases where hardware interrupts might interrupt your system, consider disabling interrupts momentarily during the critical section. This approach prevents potential data corruption by ensuring that only one entity (a thread or an interrupt) can access the resource at a time.
Message queues: Directly sharing data between tasks or threads can lead to inconsistencies, especially if one task is writing to a data structure while another is reading from it. Instead of direct data sharing, use message queues. Message queues allow tasks or threads to communicate by passing copies of data items to each other in a safe manner. This ensures data integrity and avoids the risks associated with direct data access. Also, many real-time operating systems (RTOS) offer built-in support for message queues, so they're straightforward to implement.
Embedded Development with Blues
Tools from Blues streamline embedded development, making wireless communication between IoT devices and the cloud straightforward.
The Notecard is a developer-friendly, production-ready module that enables low-level access to hardware while ensuring secure, efficient data transmission. The Notecard API supports requests and responses in the JSON format, so integration takes only a couple of API calls, significantly reducing your time-to-market.
Likewise, Blues offers both C and Arduino SDKs (among others), making it easy to program in your language of choice.
Blues tools are particularly helpful for IoT applications demanding real-time responsiveness and robust security. For more information, explore the developer portal.
Conclusion
With its unmatched efficiency and flexibility, C is the main player in the world of embedded systems. While newer languages and platforms jostle for our attention, C remains the robust, reliable backbone, powering countless tiny yet mighty electronic brains.
However, proficiency in C takes more than learning its basic syntax and structures. To achieve it, you must practice, challenge yourself, and commit to continued learning.
To further your understanding and sharpen your skills, be sure to follow Blues University, where you can explore and contribute to shaping the future of IoT. Whether you're looking to optimize wireless communication through Blues hardware or aspiring to become a seasoned embedded systems engineer, Blues University offers a range of courses that align with our mission of transforming every physical product into an intelligent service.
If you're new to embedded development and the IoT, the best place to get started is with the Blues Starter Kit for Cell + WiFi and then join our community on Discourse. 💙